Reinforcement learning robust humanoid locomotion and whole body control
Enabling reliable locomotion and whole-body control for manipulation tasks is fundamental for the real-world deployment of humanoid robots in excrement disposal tasks. Classical model-based control approaches often fail when applied to high-Degrees-of-Freedom systems. The complexity of coordinating numerous joints, combined with dynamic and unpredictable environments, makes traditional methods insufficient. Therefore, a learning-based pipeline leveraging modern simulation platforms and scalable training techniques is essential to unlock the full potential of humanoid robots for medical applications.
Multimodal situational awareness and safe navigation in medical environment
Situational awareness is essential for the safe and reliable operation of humanoid robots in medical environments. For excrement disposal tasks, the robot must accurately localize itself for path planning while simultaneously avoiding static and dynamic obstacles such as medical equipment and personnel.
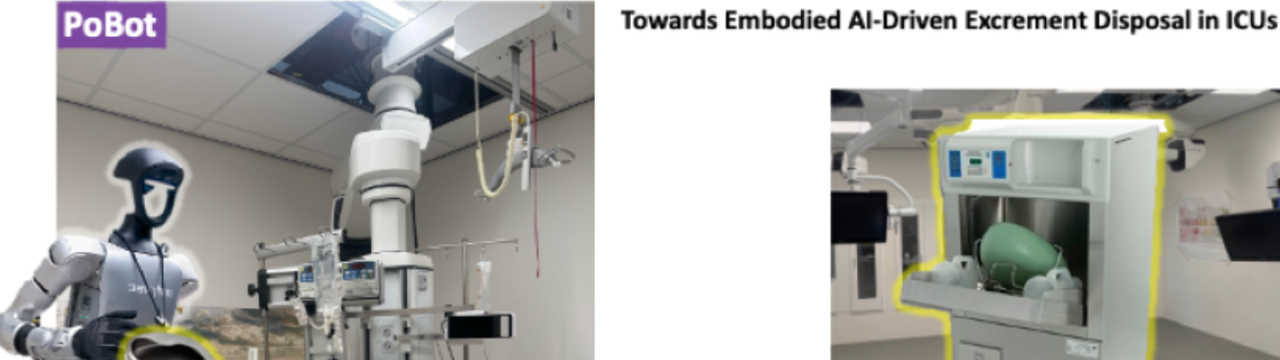
Medical-centric real-world deployment with user interface and user studies
Demonstrating real-world usefulness in clinical settings is essential to guide and validate the project. All trained policy networks are to be deployed fully onboard the humanoid robot with real-time performance, without reliance on cloud-based services, to meet privacy and performance requirements in healthcare. Additionally, user experience from a medical perspective must be actively considered, including the development of human–machine interfaces.